


Protect your sonar from accidental irreparable damage, loss or theft.
First year at €31.99 €39.99, available via in-app purchase.
SONAR OWNERS' CHOICE
Premium+
Community-based fishing maps + sonar owner benefits.

Depth Maps

Hardness Maps

3D Maps

Sonar Loss Protection

20% Off Accessories
First year at €31.99 €39.99, available via in-app purchase.
Best Sonars on the Market
-
Deeper CHIRP+ 3 Power Bundle
Regular price €399,00 EURRegular priceUnit price per -
Deeper Smart Sonar Chirp+ 3
Regular price €399,00 EURRegular priceUnit price per -
Deeper Chirp+ 2 with Limited Edition Colors
Regular price €329,99 EURRegular priceUnit price per -
Deeper Smart Sonar CHIRP+ 2
Regular price €329,99 EURRegular priceUnit price per -
Deeper Sonar PRO+ 2
Regular price €229,00 EURRegular priceUnit price per€0,00 EURSale price €229,00 EUR -
Deeper Sonar PRO
Regular price €199,99 EURRegular priceUnit price per -
Deeper Fishfinder START
Regular price €114,00 EURRegular priceUnit price per













Accessories
-
Deeper Range Extender Kit for Bait Boat
Regular price €179,99 EURRegular priceUnit price per -
Deeper Range Extender and Holder
Regular price €149,99 EURRegular priceUnit price per -
Deeper Quest Tablet and Remote Controller Holder
Regular price €74,99 EURRegular priceUnit price per -
Deeper Sonar Flexible Arm Mount 2.0 for Boat or Kayak
Regular price €69,99 EURRegular priceUnit price per -
Deeper Tripod
Regular price €69,99 EURRegular priceUnit price per -
Smartphone Mount for Boat and Kayak
Regular price €49,99 EURRegular priceUnit price per -
Deeper Bank Stick Phone Holder
Regular price €30,00 EURRegular priceUnit price per€45,00 EURSale price €30,00 EURSale -
Deeper Winter Smartphone Case 2.0
Regular price €44,99 EURRegular priceUnit price per








Wondering which sonar is best for you?
We have prepared a comparison table of all the Deeper sonars, so that you would select the perfect one for you, according to your fishing needs.
How sonars work?

Find the right spot Faster!

Cast
Know the depth of any spot in an instant just by casting out - it’s quicker and causes less disturbance than using a marker float.

Scan
Reel in your Deeper sonar slowly and steadily to locate different features and vegetation areas, and to see bottom contour, hardness and consistency.

Map
All scans and maps are saved to Fish Deeper app. By seeing and knowing more, you’ll be able to find hot spots faster, locate target species better and map it all for later retrieval and analysis.

Target
Find out how the depth changes in different spots and locate those shelves and humps the carp hang around.
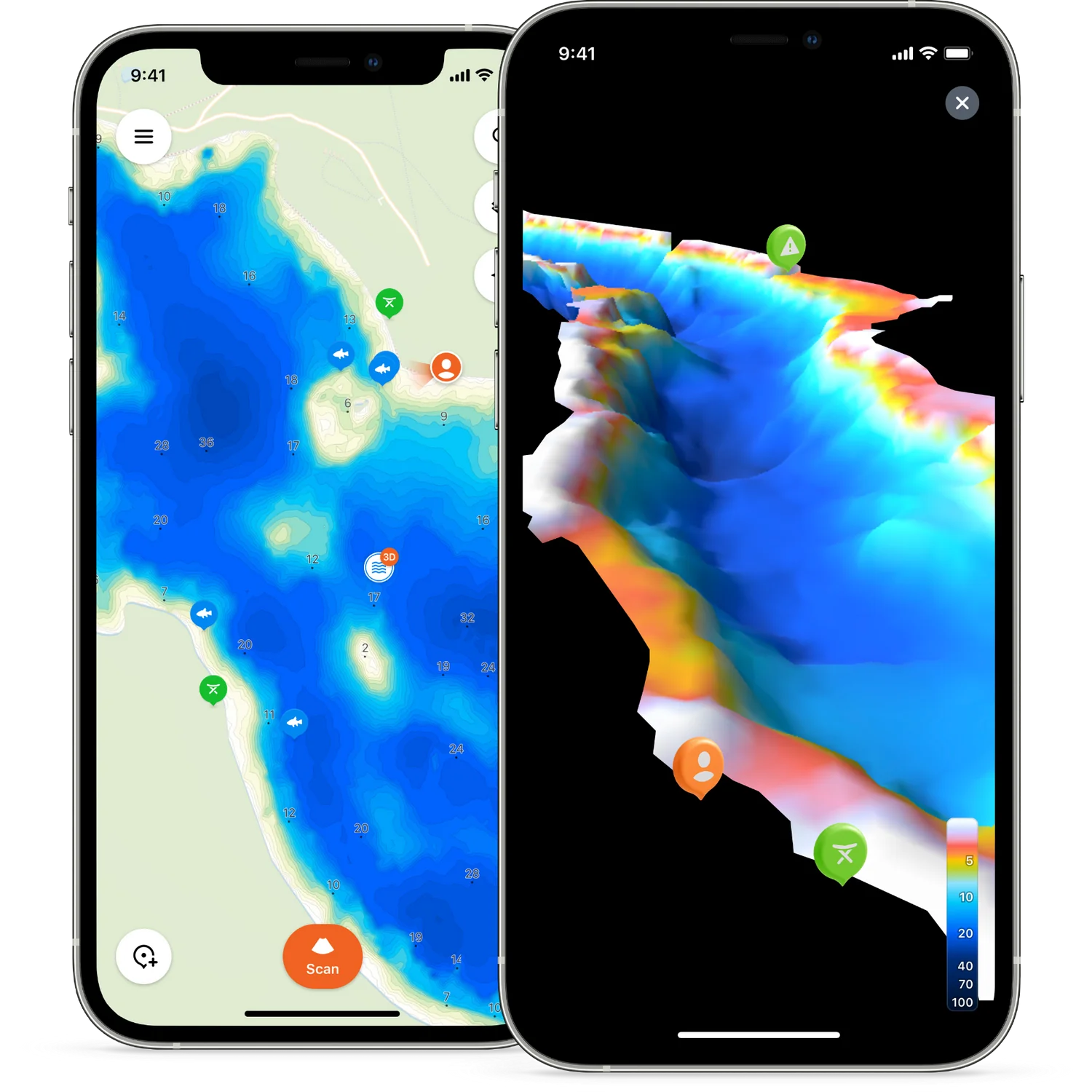
PREMIUM MAPS
Uncover the details of your favourite waters.
2D Depth Maps. One of the largest databases of regularly updated community-based depth maps.
3D Terrain Maps. Stunning three-dimensional terrain maps showcasing topographic underwater features.