Hoe sonars werken
Als u begrijpt hoe sonars werken en hoe u uw visvinder moet gebruiken, dan kan dit het verschil betekenen tussen niets vangen en een persoonlijk record neerzetten. In deze korte handleiding over de werking van sonars krijgt u basiskennis over uw visvinder en handige tips voor eenvoudig gebruik.
SONAR staat voorSOundNAvigationRanging. Een sonarapparaat werkt door middel van pulserende geluidsgolven die onder water omlaag worden gestuurd. Na het raken van een object zoals een vis, vegetatie of de bodem, weerkaatsen deze pulsen terug naar het oppervlak. Het sonarapparaat meet hoe lang de geluidsgolf er over doet om weer terug te keren. Het werkt hetzelfde als de echolocatie die vleermuizen en dolfijnen gebruiken. Met deze informatie kan het apparaat de diepte van het object beoordelen waarop de pulsen weerkaatst worden. Het meet ook de kracht van de terugkomende puls. Hoe harder de objecten, hoe sterker de terugkomende puls.
Na het meten van de terugkomende puls wordt een nieuwe puls uitgezonden. Omdat geluidsgolven onder water met ongeveer 1,5 kilometer per seconde bewegen, kunnen de sonars meerdere pulsen per seconde sturen. De Deeper PRO, Deeper PRO+ 2 en Deeper CHIRP+ 2 zenden 15 pulsen per seconde uit. De terugkerende geluidsgolven worden omgezet in elektrische signalen en daarna weergegeven. Vissers krijgen zo inzicht in de hardheid en de diepte van de bodem en eventuele objecten daar tussenin.
Vier dingen om te onthouden
-

Sonars scannen in de vorm van een kegel, niet in lijnen.
-

Een bewegend scherm wil niet zeggen dat de sonar beweegt (of dat er veel vis is).
-

Dikkere lijnen en een tweede terugkomst van de sonar betekenen een hardere bodem.
-

Waar u bogen ziet, daar zit de vis.
1. Sonars scannen in de vorm van een kegel, niet in lijnen
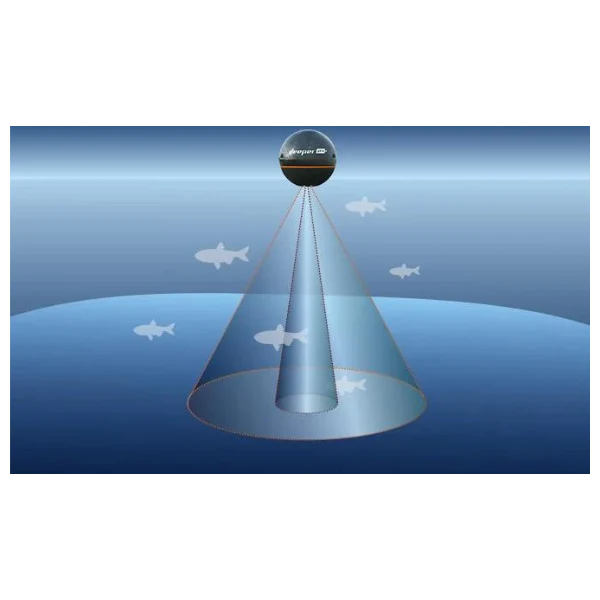
Als we het scherm van de visvinder aflezen, denken we meestal dat de informatie die we zien zich recht onder onze sonar afspeelt. Als we dus een vis op het scherm zien, denken we dat die vis direct onder de sonar zwemt. In werkelijkheid komen de gegevens die we zien uit een groter gebied onder onze sonar. En nog belangrijker, hoe dieper u scant, hoe groter het gebied is waaruit de sonar gegevens ontvangt. Dit komt doordat sonars scannen in de vorm van een kegel;
Dit werkt als volgt:
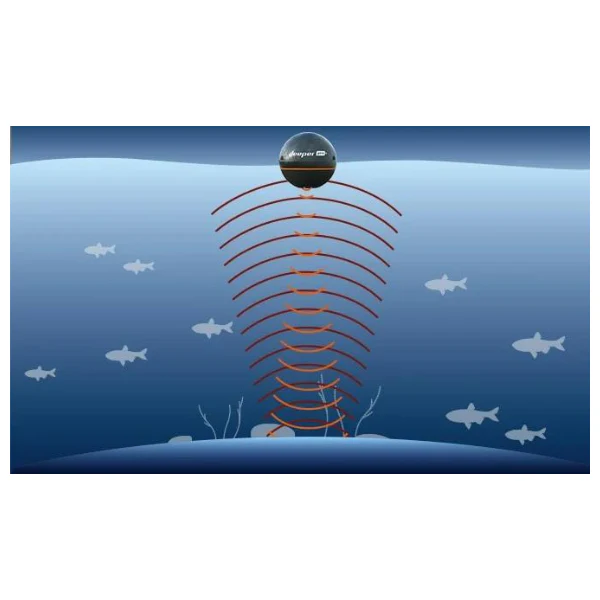
Sonars versturen geluidspulsen om voorwerpen te lokaliseren. Geluid beweegt zich voort in golven, niet in rechte lijnen. Deze golven worden steeds breder en maken zo een kegelvorm.
De meeste sonars kunnen het bereik van deze kegel van geluidsgolven besturen door de frequentie van de scannende straal te veranderen. Dit is belangrijk omdat andere scannende stralen meer of minder effectief zullen zijn in verschillende vis-omstandigheden.
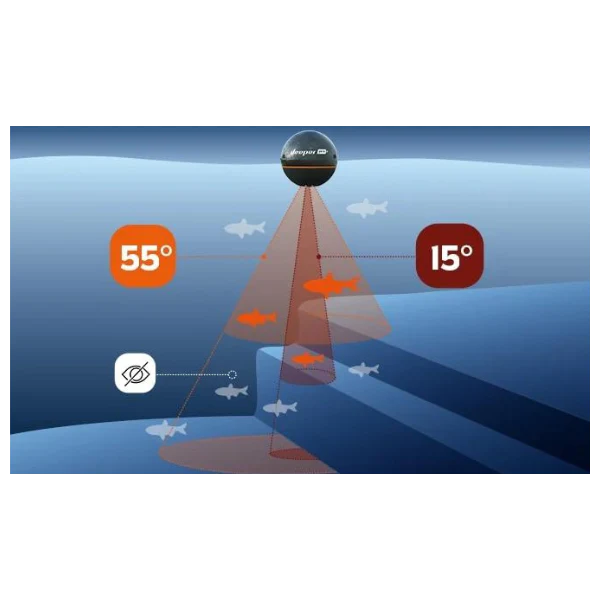
Scannen met een brede straal (gewoonlijk een hoek van 40° tot 60°) is handig voor het scannen van grote gebieden om zo algemene informatie te krijgen over de structuur van de diepte en de bodem. Helaas is deze manier van scannen wel minder nauwkeurig en minder gedetailleerd. Het scannen met een brede straal is het meest geschikt voor ondiepe wateren, want wanneer de kegel een groter gebied bestrijkt, scant de sonar ook dieper. Dat wil zeggen dat als u op een diepte van 13,7 meter scant, u objecten zult zien in een gebied met een straal van 14,3 meter.
Het scannen met een smalle straal (een hoek rond 10° tot 20°) levert meer details op maar bestrijkt een kleiner gebied. Dit is beter om de exacte locatie van de vis te vinden. Het scannen met een smalle straal is ook aan te raden voor dieper water, omdat de kegel dan niet zo breed wordt.
Oppervlakteruis en blinde zones
Een ander aspect om rekening mee te houden voor wat betreft de breedte van uw stralingsbundel, is dat u in sommige gevallen objecten vlak onder het wateroppervlak niet kunt detecteren.
Dat komt door de zogenaamde oppervlakteruis, iets wat bij alle sonars voorkomt. Oppervlakteruis ontstaat doordat het water vlak onder het oppervlak sommige sonarsignalen weerkaatst en deze weerkaatsingen te snel gaan voor de sonar om juist te verwerken. Deze weerkaatsing heeft meerdere oorzaken. De meest voorkomende oorzaken zijn golven op het oppervlak, bellen, stroming en algen. Het resultaat is dat er een heleboel ’sonarruis’ te zien is aan het oppervlak. Hierdoor ontstaat een ’blinde zone’ waarin het niet mogelijk is om vis te identificeren.
De hoeveelheid ruis en de oppervlakte van deze blinde zone kan worden verkleind met een hogere signaalfrequentie van de sonar. Als u over een Deeper PRO beschikt en u veel oppervlakteruis ervaart, kunt u de signaalfrequentie hoger zetten (smalle straal naar 290kHz 15°). Bij Deeper START is de sonarfrequentie 120 kHz, wat betekent dat de ruis onder het oppervlak tot wel 1 meter. diep kan zijn.
De Deeper PRO+ 2 en CHIRP+ 2 hebben de minste ruis en vertroebeling aan het oppervlak. Zo leveren ze nauwkeurige metingen tot 15 cm vanaf het wateroppervlak.
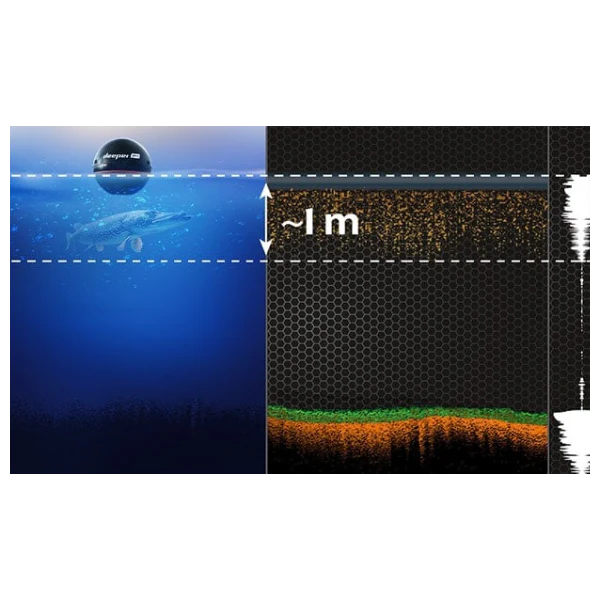
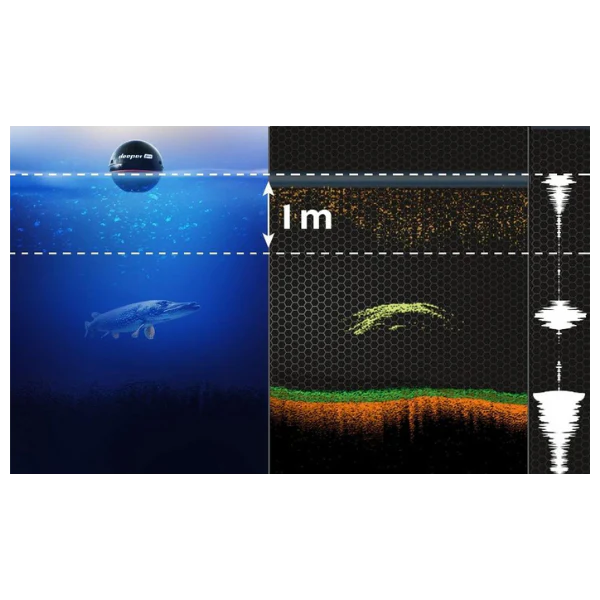
Het plaatje hieronder schetst 2 verschillende situaties waarbij oppervlakteruis uw sonarbeelden kan beïnvloeden – (bij deze voorbeelden strekt de ruis uit tot op ongeveer 1 meter. onder het oppervlak):
- De vis bevindt zich onder de zone met oppervlakteruis. In dit scenario is de weerkaatsing van het signaal op de vis sterk genoeg om te worden geïdentificeerd door de visvinder (in het geval van Deeper visvinders: de Fish Deeper App maakt gebruik van een algoritme om vast te stellen of het om een vis gaat). Als gevolg hiervan wordt de vis weergegeven op de app.
- De vis bevindt zich binnen de zone met oppervlakteruis. De weerkaatsing van het signaal op de vis wordt dusdanig afgezwakt door de oppervlakteruis, waardoor het te zwak is voor de visvinder om te kunnen identificeren. Als gevolg hiervan wordt de vis niet weergegeven op de app.
Waarom dit belangrijk is bij het in kaart brengen van de bodemstructuur
2. Een bewegend scherm wil niet zeggen dat de sonar beweegt (of dat er veel vis is)
Op de Fish Deeper App en op de schermen van veel andere sonars bewegen de gegevens op het scherm van rechts naar links. De meest recente resultaten bevinden zich aan de rechterkant, de oudste aan de linkerkant van het scherm. Onthoud dat uw scherm blijft bewegen, ook als uw sonar zich niet beweegt, omdat het instrument continu geluidspulsen verstuurt en ontvangt. Begrijpen hoe dit bewegende scherm werkt, is erg belangrijk voor het interpreteren van de gegevens die u van de sonar krijgt.
Waarom dit belangrijk is bij het in kaart brengen van de bodemstructuur
3. Dikkere lijnen en een tweede terugkomst van de sonar betekenen hardere bodems
Uw sonar kan u niet alleen vertellen hoe de bodemstructuur eruitziet, maar geeft ook aan hoe hard de bodem is. Dat gaat als volgt:
Sonars meten zowel de tijd dat het duurt voordat een geluidspuls terugkomt als de sterkte van het terugkerende signaal. Hierdoor kan het laten zien hoe hard of zacht de voorwerpen onderwater zijn. Zachte objecten met een lage dichtheid reflecteren een zwakker signaal dan harde objecten met een hoge dichtheid.
Het scherm van de sonar geeft aan hoe hard een object is door middel van kleuren en felheid: hoe feller de kleur, hoe sterker het signaal en dus hoe harder het object. Dit is vooral van belang bij het scannen van de bodem.
U ziet wellicht dat de bodemweergave op sommige plekken dikker en feller is (harde bodem) en op sommige plekken dunner en minder fel (zachte bodem). Soms ziet u ook een tweede terugkomst van de sonar van de bodem. De bodem is hier zo hard dat de straal van de sonar terug naar boven wordt gekaatst, nog eens omlaaggaat, weerkaatst vanaf de bodem en dan wordt opgepikt door de sonar.
-
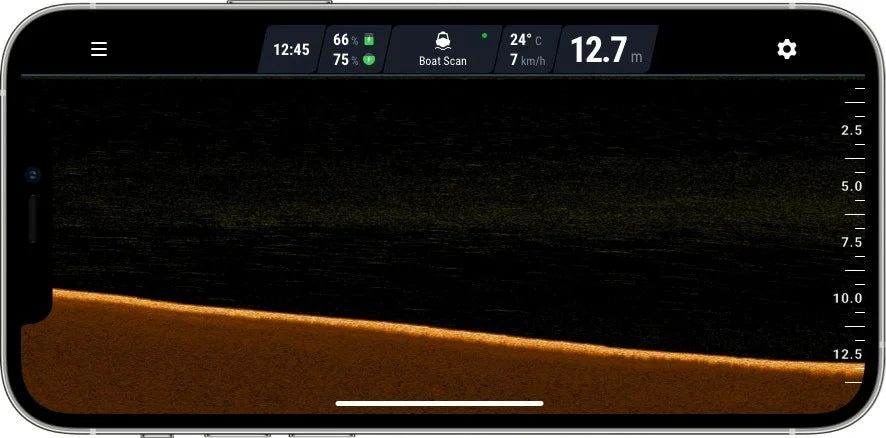
Voorbeeld van een zachte bodem
-

Voorbeeld van een “tweede bodem”


Waarom dit belangrijk is bij het in kaart brengen van de bodemstructuur
4. Waar u bogen ziet, daar zit de vis
Het gebruiken van icoontjes in de vorm van een vis is een goede manier om met de visvinder te beginnen, maar met de onbewerkte gegevens bent u veel beter in staat om de vis en de grootte van de vis nauwkeuriger op te sporen. Als u er klaar voor bent schakelt u de icoontjes in de vorm van een vis uit en kijkt u waar de bogen zich bevinden.
Inklapbare content

Waarom bogen?
In de meeste gevallen ziet een vis er op uw beeldscherm uit als een boog. De reden daarvoor is zeer eenvoudig. Als een vis precies door de kegel van de sonar zwemt, reflecteert het de geluidspulsen eerst aan de rand van de kegel, dan in het midden en vervolgens aan de andere rand. De terugkomende signalen van de twee randen van de kegel doener iets langer over om de sonar te bereiken dan de terugkomende signalen vanuit het midden. Dit vormt een boog of de vorm van een vingernagel op uw beeldscherm.
De vis lokaliseren
Belangrijke informatie om te onthouden met betrekking tot visbogen:
- Een boog wordt alleen weergegeven als de vis beweegt (of als uw sonar eroverheen beweegt).
- Als de vis en uw sonar beiden niet bewegen, ziet u een lijn in plaats van een boog.
- U ziet alleen een hele boog als de vis volledig door de kegel van de sonar zwemt.
- Als de vis slechts gedeeltelijk door de kegel zwemt, dan ziet u een halve boog of een dik streepje. Ga hiernaar op zoek
Denk verticaal, niet horizontaal
Lange bogen betekenen een grote vis, toch? Fout. Lange bogen betekenen dat de vis een lange tijd in de kegel van uw sonar heeft gezommen.
Vergeet ook niet dat de diepte hier een rol speelt; vis die dieper zit wordt weergegeven met langere bogen of lijnen, want de kegel van de sonar is hier breder en dus blijft de vis hier langer. Een enorme vis dicht aan het oppervlak kan misschien maar een kleine boog of een klein lijntje veroorzaken
Hoe weet ik dan hoe groot de vis is?
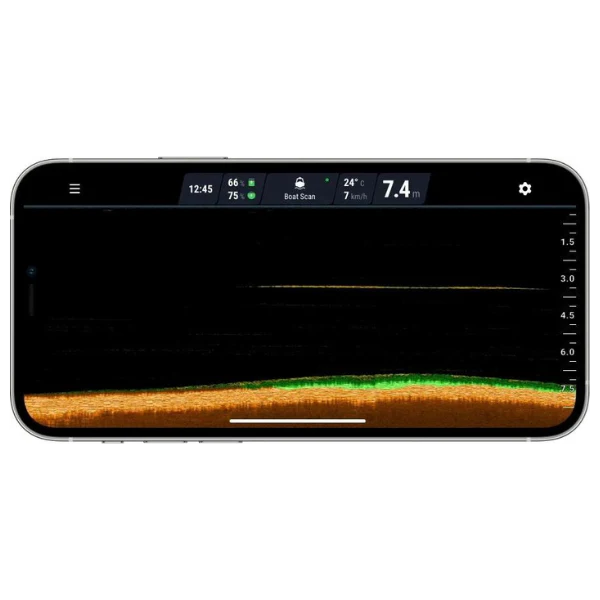
Het antwoord is dikte. Als u een dikke boog of lijn ziet, dan gaat het om een grote vis. Denk dus verticaal, niet horizontaal
De eerste afbeelding is een perfect voorbeeld. Deze grote vissen hebben geen volledige boog gemaakt, maar de lijnen zijn verticaal dik en dus weten we dat het om grote vissen gaat.
Het lokaliseren van aasvis gaat op dezelfde manier. Let niet op de lengte van de lijnen, maar let op de dikte en hoe geclusterd de markeringen zijn.